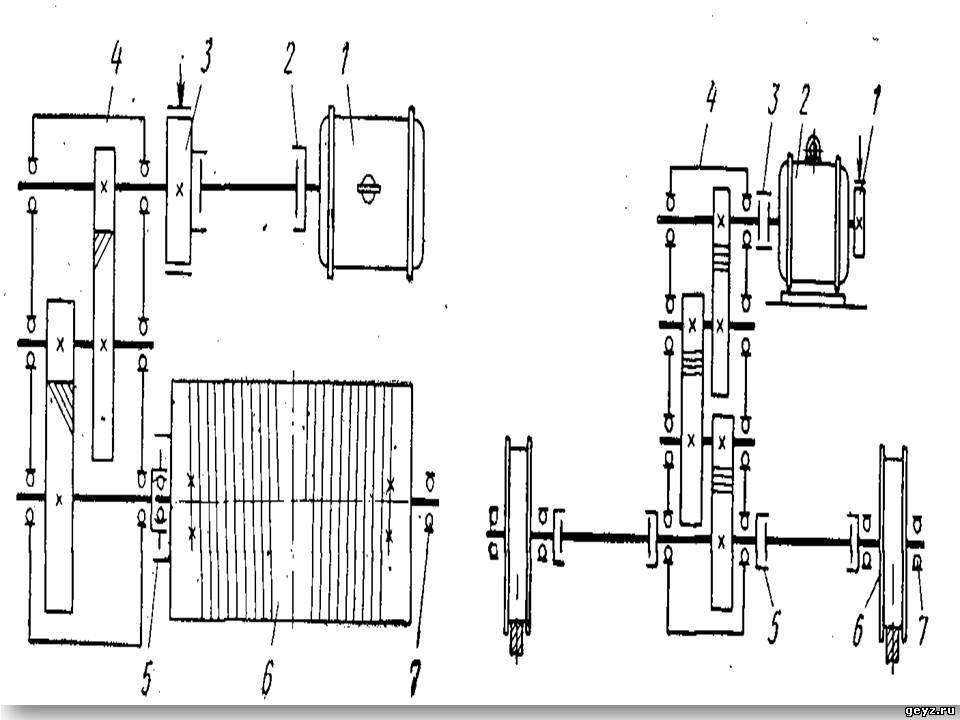
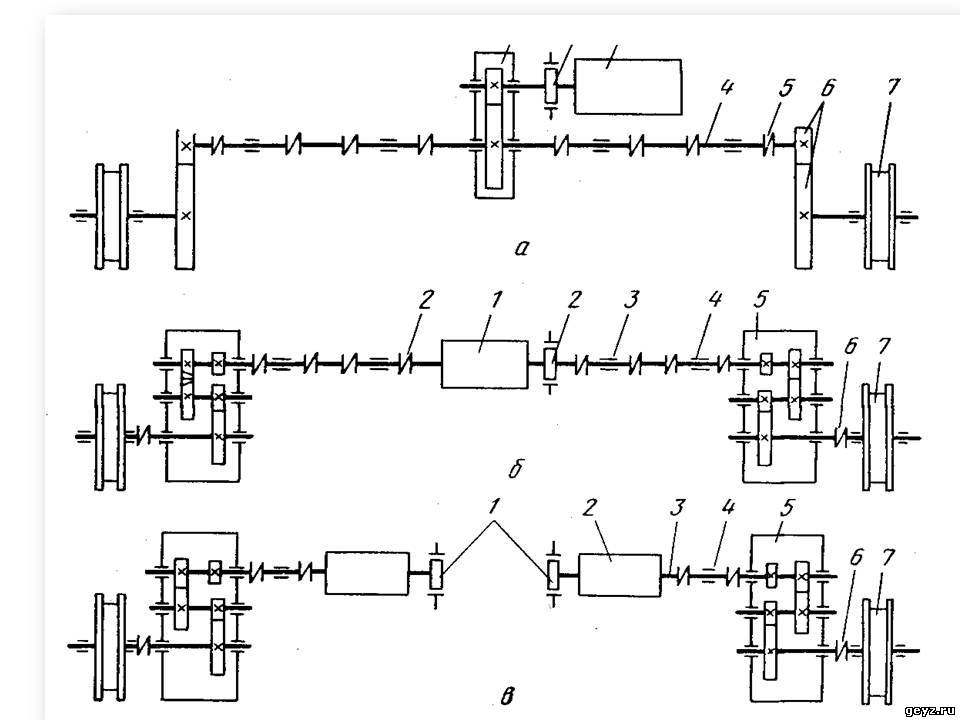
Механизм подъема. Кинематическая схема механизма подъема груза показана на рис. 25. Механизм состоит из четырех основных блоков-узлов: электродвигателя, тормоза, редуктора и барабана, связанных между собой муфтами. При такой конструкции механизма возможна быстрая смена одного или нескольких узлов. Наличие муфты с промежуточным валом между электродвигателем и редуктором компенсируют неточности изготовления и монтажа, а также деформации во время работы. Установкой специальной зубчатой муфты между барабаном и редуктором достигается большая компактность соединительного устройства при сохранении блочности узлов. На наружной поверхности выходного вала редуктора нарезаны зубья, которые входят в зацепление с зубчатым венцом ступицы барабана, образуя своеобразную муфту. РИС. 25. Кинематическая схема механизма подъема груза:. / — электродвигатель: 2 — муфта зубчатая с промежуточным валом: 3 — тормоз; 4 — редуктор: 5 — муфта зубчатая специальная: 6 — барабан: 7 — внешняя опора барабана РИС. 26. Кинематическая схема механизма передвижения тележки: / — тормоз; 2 — электродвигатель; 3 — зубчатая муфта; 4 — вертикальный редук¬тор; 5 — муфта с промежуточным валом; 6 — ходовое колесо; 7 — подшипники в буксах Механизм передвижения тележки (рис. 26). Тележки мостовых кранов общего назначения обычно имеют четыре ходовых колеса, из которых два приводные. Ходовые колеса и буксы образуют единый узел, отвечающий условиям взаимозаменяемости. В механизмах передвижения тележек применяют трехступенчатые вертикальные редукторы типа В К. Быстроходный вал редуктора связывают с валом двигателя нормальной зубчатой муфтой (МЗ). На второй конец вала двигателя насаживают тормозной шкив. Концы тихоходного вала редуктора соединяются с ходовыми колесами зубчатыми муфтами с промежуточными валами. Такие муфты даже при больших деформациях рамы тележки во время подъема груза обеспечивают хорошую передачу крутящего момента от редуктора к ходовым колесам. Механизмы передвижения кранов. Число ходовых колес крана зависит от его грузоподъемности. Краны грузоподъемностью до 50 т перемещаются на четырех ходовых колесах. В тяжелых мостовых кранах число ходовых колес может достигать 24. В кранах с восемью и большим числом колес для равномер- Механизмы передвижения мостов кранов выполняют с центральным или раздельным приводом. У механизмов передвижения с центральным приводом может быть тихоходная (рис. 27, а) или быстроходная (рис. 27, б) трансмиссии. РИС. 27. Кинематические схемы трансмиссии моста крана: а — тихоходная трансмиссия; Б — быстроходная трансмиссия; в — трансмиссия с индивидуальным приводом В механизмах с тихоходной трансмиссией (рис. 27, а) электродвигатель 3 муфтой 2 соединен с одноступенчатым редуктором /, вращающим вал 4. Трансмиссионный вал состоит из отдельных секций, соединенных жесткими муфтами 5. С концевых участков вала через зубчатую передачу 6 вращение передается ходовым колесам 7. В механизмах с быстроходной трансмиссией (рис. 27, 6) электродвигатель 1 полумуфтами 2 непосредственно соединен с валом 3, вращающимся в подшипниках 4. Одна из полумуфт служит тормозным диском тормоза механизма передвижения моста. Вал опирается на сферические двухрядные шариковые подшипники. Отдельные секции вала соединены муфтами, концевые участки вала соединены муфтами с редукторами 5, выходные валы которых через муфты 6 приводят во вращение валы ходовых колес 7. 56 Преимущества механизма передвижения описанной конструкции по сравнению с механизмом передвижения предыдущей конструкции заключаются в резком уменьшении диаметра вала (передающего меньший крутящий момент) и соответствующем снижении массы деталей. В механизмах передвижения с индивидуальным приводом (рис. 27, е) имеются два синхронно работающих механизма, каждый из которых состоит из электродвигателя 2, редуктора 5, вала 3, вращающегося в подшипниках 4, приводных ходовых колес 7, соединенных с редуктором муфтой 6, и тормоза 1. Суммарная мощность двух электродвигателей в этом случае не превышает мощности одного электродвигателя в схеме с центральным приводом. Преимущества индивидуального привода заключаются в компактности всего механизма передвижения, меньших маховых моментах электродвигателей, в сокращении времени пуска.