Главная » 2011 » Январь » 26 » Привод грузоподъемных машин. Пример выбора привода.
19:48
Привод грузоподъемных машин. Пример выбора привода.
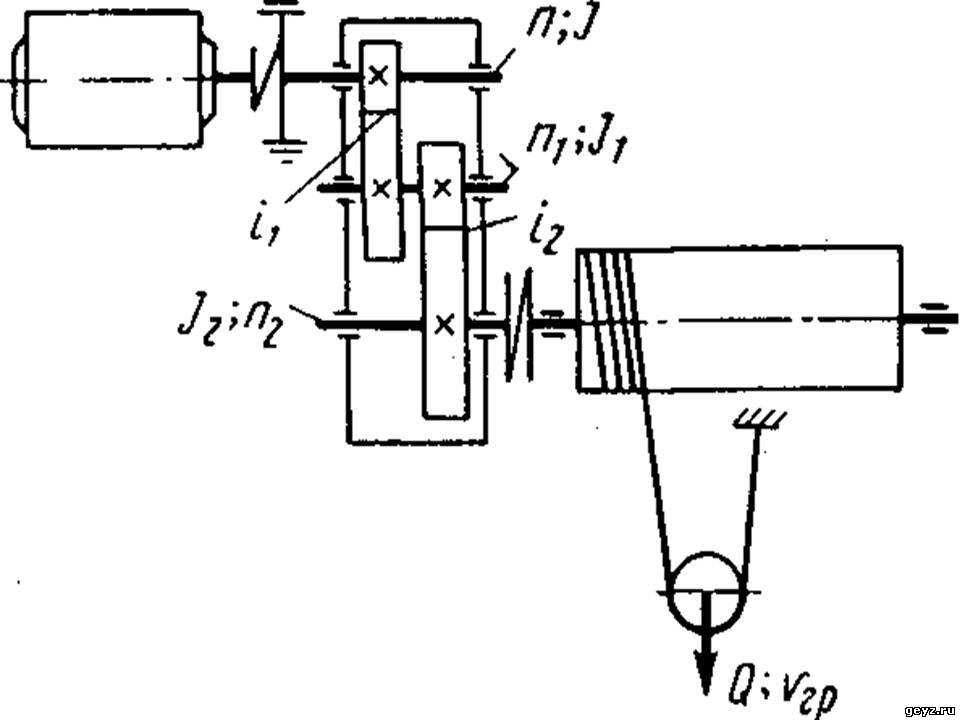
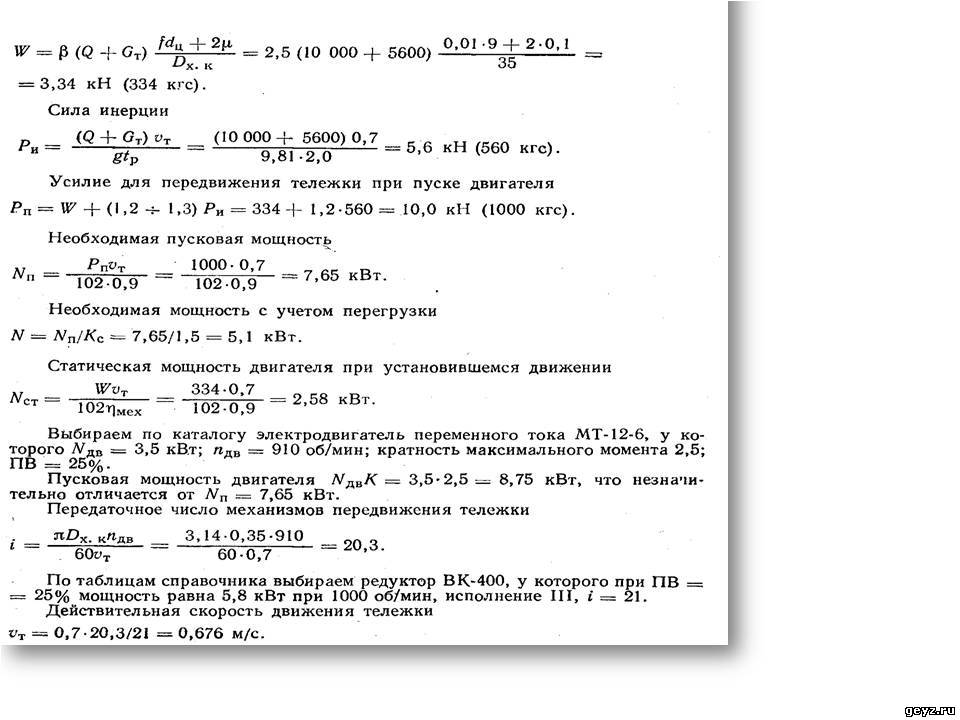
ПРИВОД ГРУЗОПОДЪЕМНЫХ МАШИН В зависимости от типа, назначения и характера работы грузоподъемной машины механизмы ее снабжают различными приводами: ручным, электрическим, паровым, от двигателя внутреннего сгорания, гидравлическим и пневматическим. 1. Ручной привод Ручной привод применяют в ручных лебедках, талях, при ремонтно-монтажных работах и в технологическом оборудовании, работающем краткогремснио с небольшими нагрузками. Передаточное число всех ручных приводов механизмов определяют отношением момента груза Мгр к моменту рукоятки Мрук- 2. Электрический привод Наиболее часто в грузоподъемных машинах применяют электрический привод. Это объясняется следующими его особенностями: 1) возможность установки самостоятельного электродвигателя к каждому механизму грузоподъемной машины, что значительно упрощает конструкцию и управление механизмами; 2) высокая экономичность эксплуатации электропривода по сравнению с другими типами приводов; 3) безопасность и простота управления электродвигателями, простота конструкции и надежность работы различного рода предохранительных устройств, постоянная готовность к действию; 4) возможность работы со значительными кратковременными перегрузками. Для крановых механизмов, работающих при повторно-кратковременных режимах, применяют преимущественно двигатели трехфазного тока серии МТ с контактными кольцами (с фазовым ротором) и серии МТК с короткозамкнутым ротором. Различают длительный, кратковременный и повторно-кратковременный режимы работы электродвигателей. При длительном режиме электродвигатель может работать неограниченно долго с полной нагрузкой, не перегреваясь. При кратковременном режиме период работы электродвигателя настолько мал по сравнению с паузами, что он успевает охладиться до температуры окружающей среды. Крановые электродвигатели работают в повторнократковременном режиме, при котором периоды кратковременной работы с продолжительным периодом пауз (остановок) достаточны для охлаждения электродвигателя. При указанном режиме электродвигатель нагревается меньше, чем при длительной непрерывной работе, и поэтому его можно больше нагружать. Характеристикой режима работы электродвигателей является относительная продолжительность включения. ПВ = 15% (легкий режим работы), ПВ = 25% (средний режим работы), ПВ = 40% (тяжелый режим работы). Чем больше продолжительность включения, тем меньшую нагрузку может нести электродвигатель. Крановый электродвигатель должен удовлетворять следующим требованиям: 1) при работе с заданной продолжительностью включения (ПВ) двигатель не должен нагреваться выше допускаемого предела; 2) мощность двигателя должна быть достаточной для того, чтобы обеспечить разгон механизма в заданный период времени; 3) мощность двигателя не должна быть завышенной (во избежание раскачки груза, поломок механизма и др.). 3. Паровой, гидравлический и пневматический приводы Паровой привод, для которого необходимы паросиловые установки с самостоятельным паровым котлом, в настоящее время практически не находит применения в грузоподъемных механизмах вследствие больших размеров и массы, низкого к. п. д., а также других причин. Вместо парового привода в передвижных кранах широко применяют привод от двигателей внутреннего сгорания. Используют карбюраторные и дизельные двигатели, работающие на жидком и газообразном топливе. Преимуществами этого типа привода являются постоянная готовность к работе, относительно небольшие размеры и масса, высокий к. п. д. (по сравнению с паровой машиной). К недостаткам этого типа привода относятся: а) невозможность пуска двигателя внутреннего сгорания под нагрузкой, что вызывает необходимость установки фрикционных муфт, отключающих двигатель от механизма при пуске; б) необходимость установки реверсивных муфт и дополнительных тормозов, так как у двигателя внутреннего сгорания постоянное направление вращения. Обычно все механизмы грузоподъемной машины обслуживаются одним двигателем внутреннего сгорания через систему зубчатых передач и муфт, причем привод к каждому механизму должен быть снабжен реверсивным устройством. Гидравлический привод грузоподъемных машин (гидропривод) обеспечивает высокую эксплуатационную надежность, широкий диапазон регулирования скорости, плавность движения элементов машины, устранение перегрузки, большую компактность. Все это приводит к тому, что в последнее время гидропривод получает все большее применение в самых различных грузоподъемных машинах и особенно в передвижных кранах. Недостатками гидропривода являются: сложность подачи рабочей жидкости к приводу передвижной установки; ухудшение работы гидропривода при низких температурах; большие гидравлические сопротивления при наличии трубопроводов; необходимость в тщательном наблюдении за состоянием уплотнений. В пневматическом приводе сжатый воздух подается в рабочий цилиндр, поршни которого приводят в действие исполнительные механизмы. Воздух подается обычно от компрессорных установок или от основных воздушных магистралей предприятия при помощи гибких шлангов. К недостаткам пневматического привода следует отнести ограниченность радиуса действия передвижных установок вследствие наличия воздухопроводного шланга и снижения к. п. д. установки при работе с грузами меньше номинальных. Пневматический привод еще не нашел широкого применения в подъемно-транспортных машинах, и его используют при работах во взрывоопасной среде, когда применение электрооборудования становится опасным, а также на предприятиях, где имеется подвод сжатого воздуха для нужд основного производства, например в литейных цехах. 4. Динамические процессы при неустановившихся режимах работы механизма Установившееся движение в работе подъемной машины (рис. 28) наступает, когда достигается заданная скорость движения рабочего органа (барабана, ходового колеса, фермы крана). В каждом рабочем движении крана можно наблюдать три периода: период пуска (разгон), установившееся движение, период остановки (торможение). В период пуска необходима добавочная затрата работы на преодоление инерции покоя масс механизмов крана и груза (работа ускорения); в период остановки добавочную работу движущихся масс (инерция движения) поглощает тормоз. Следовательно, нагрузка на двигатель крана в период разгона будет выше, чем в период установившегося движения. Точно так же и расчет тормоза следует осуществлять с учетом влияния сил инерции. Из технической механики известно, что если тело с моментом инерции / вращается с угловым ускорением е, то динамический момент, вызывающий изменение скорости вращающихся масс. РИС. 28. Расчетная схема механизма подъема груза Определив передаточное число, по справочнику выбираем, вертикальный редуктор. 5. Редукторы В крановых механизмах рабочие органы (барабаны, ходовые колеса, и т. д.) всегда вращаются с меньшей угловой скоростью, чем валы электродвигателей. В современных мостовых электрических кранах понижение угловых скоростей двигателей до рабочих скоростей барабанов или ходовых колес производится зубчатыми редукторами. При- менение зубчатых редукторов позволяет выполнить кинематическую связь между двигателями и рабочими органами жесткой, что обеспечивает надежную работу механизмов. ' В механизмах подъема применяются цилиндрические двухступенчатые редукторы типа РМ и Ц2. Первые из них выполнены по развернутой схеме, т. е. имеют несимметричное расположение зубчатой передачи относительно опор, а вторые с раздвоенной быстроходной ступенью и симметричным расположением зубчатой передачи. Обе ступени выполнены косозубыми. Корпусы редукторов отлиты из чугуна и имеют горизонтальный разъем. Тихоходные валы редукторов могут выполняться как с цилиндрическим концом, так и в виде зубчатой или кулачковой муфт. Редукторы типа Ц2 имеют значительно меньшую массу и габариты, чем редукторы типа РМ. В механизмах передвижения тележек применяются вертикальные трехступенчатые редукторы типа В К. Эти редукторы выполнены по развернутой несимметричной схеме. В механизмах передвижения мостов могут применяться редукторы всех трех типов. Кроме того, в кранах большой грузоподъемности применяются и вертикальные крановые усиленные редукторы типа ВКУ. К. п. д. редукторов довольно высок и равен 0,94—0,98 для РМ и Ц2 и 0,91—0,95 для ВК и ВКУ. Редукторы этих серий рассчитаны на режим работы 15,25 и 40% ПВ и числа оборотов быстроходного вала в минуту 600, 750, 1000. Шестерни редукторов изготовляются из стали марки 45, а зубчатые колеса — из стального литья марки 55Л. Суммарное межосевое расстояние редуктора определяет его типоразмер. Каждая серия редукторов имеет свой ряд Типоразмеров. Редукторы каждого типоразмера изготовляются в нескольких исполнениях по передаточным числам. Выбор необходимого редуктора для механизмов подъема и передвижения производится по расчетному передаточному числу из таблиц справочника. Применение в крановых механизмах серийных редукторов открывает большие возможности по созданию блочных конструкций с максимальной взаимозаменяемостью целых узлов и отдельных деталей. 6. Муфты В кинематической цепи крановых механизмов муфты выполняют роль связующего звена между валами приводных двигателей, редукторов и валами рабочих органов (барабанов, ходовых колес и т. д.). Преимущественное распространение получили зубчатые муфты общего назначения типа МЗ и МЗП (ГОСТ 5006—55), а также муфты приводные с тормозными шкивами типа МПТ конструкции ВНИИПТмаша. Муфты типа МЗ применяются для непосредственного соединения валов, а муфты типа МЗП — для соединения валов с применением промежуточного вала. В комплект муфты МЗП входят две зубчатые муфты, соединенные между собой промежуточным валом. Муфты приводные с тормозными шкивами типа МПТ предназначены для соединения валов двигателей с валами редукторов непосредственно или при помощи промежуточного вала. Пример 7. Выбрать электродвигатель и редуктор механизма передвижения тележки грузоподъемностью Q = 10 ООО кг, если вес тележки G = 56 кН (5,6 тс), скорость передвижения тележки Vr = 42 м/мин (0,7 м/с), диаметр колеса Dx. к = 350 мм, диаметр цапфы rf„ = 90 мм, приведенный коэффициент трения в буксах ходовых колес / = 0,01 при подшипниках качения, коэффициент трения ходовых колес по рельсу [х = 0,1 см, коэффициент Р = 2,5, к. п. д. механизма передвижения тележки т)мех = 0,9 и время разгона двигателя /р = 2 с. Сила сопротивления движению ходового колеса тележки