Главная » 2012 » Февраль » 14 » Конструкции, принцип работы и схемы мембранных приводов запорной трубопроводной арматуры.
15:11
Конструкции, принцип работы и схемы мембранных приводов запорной трубопроводной арматуры.
Сумки и рюкзаки на любой вкус: пневмодомкрат цена. Подъёмные подушки домкраты.
Мембранные приводы арматуры
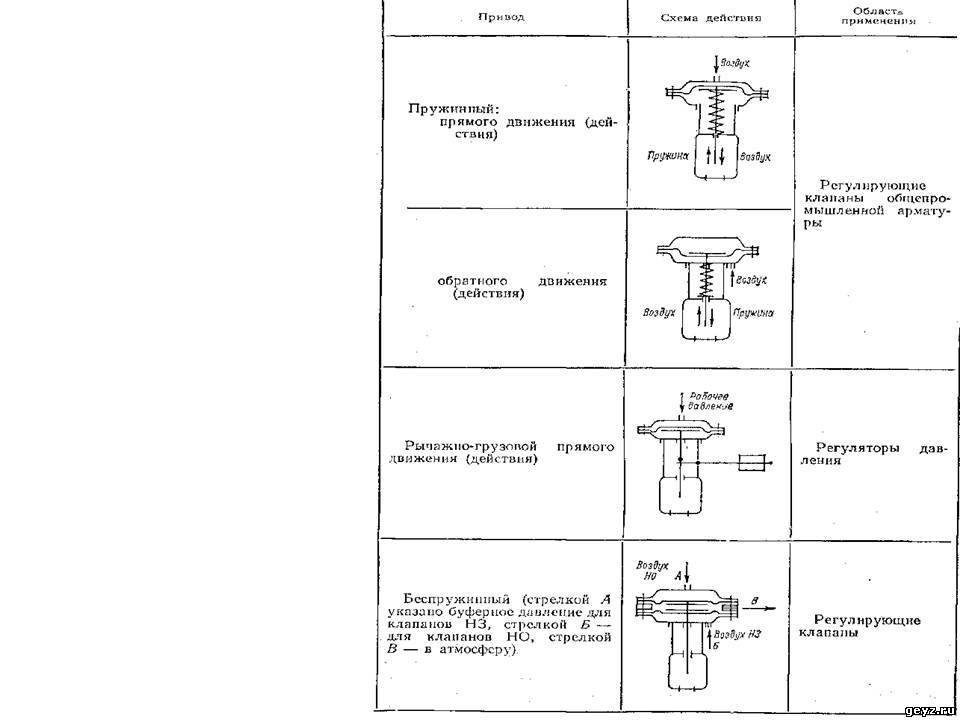
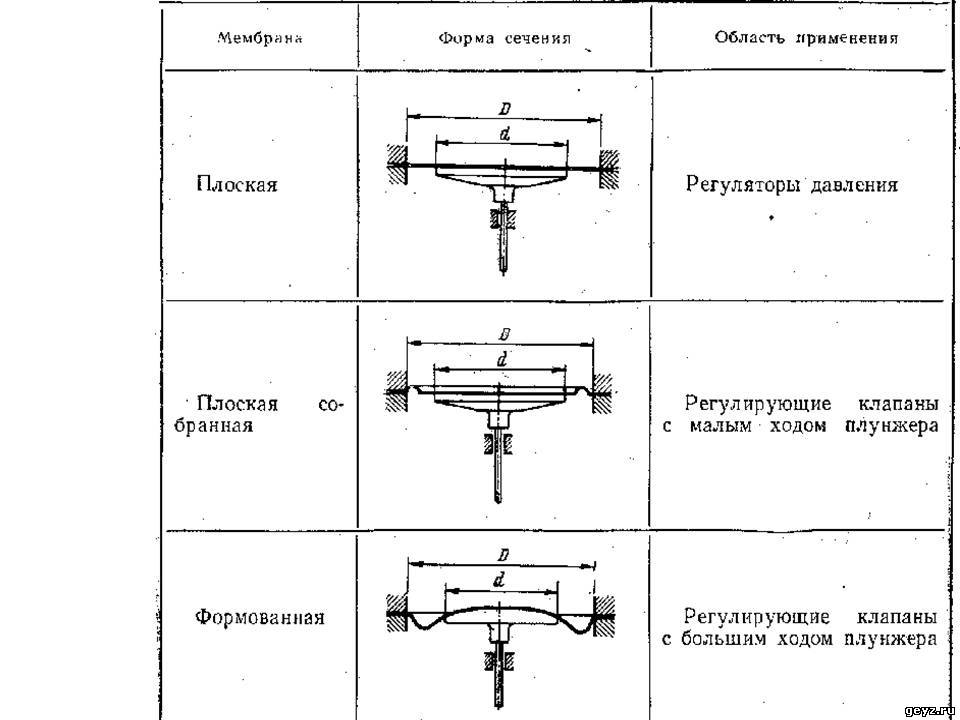
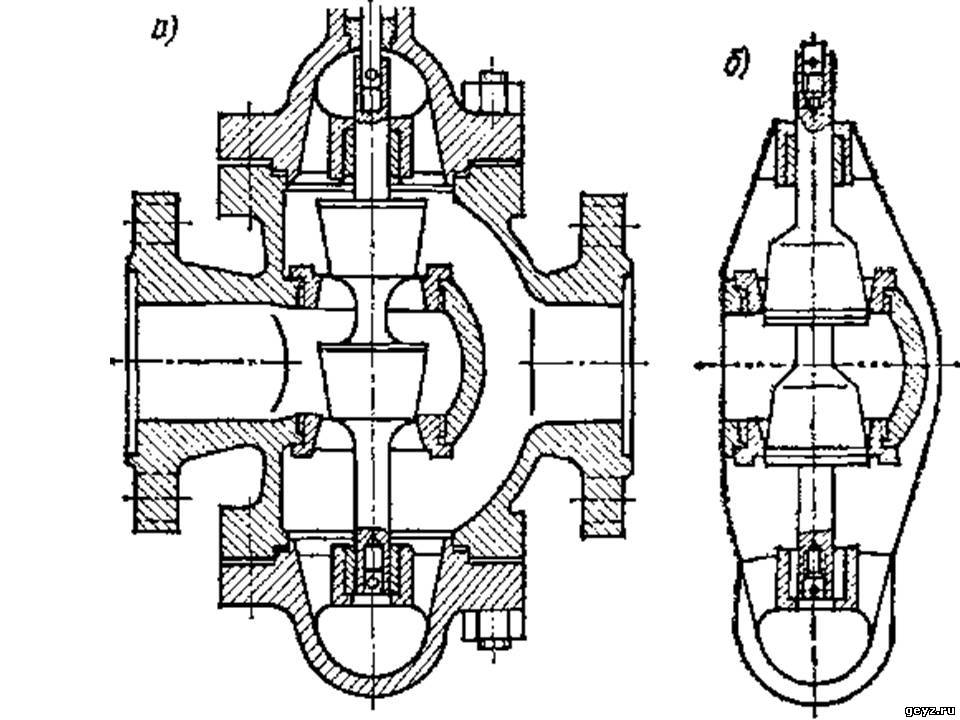
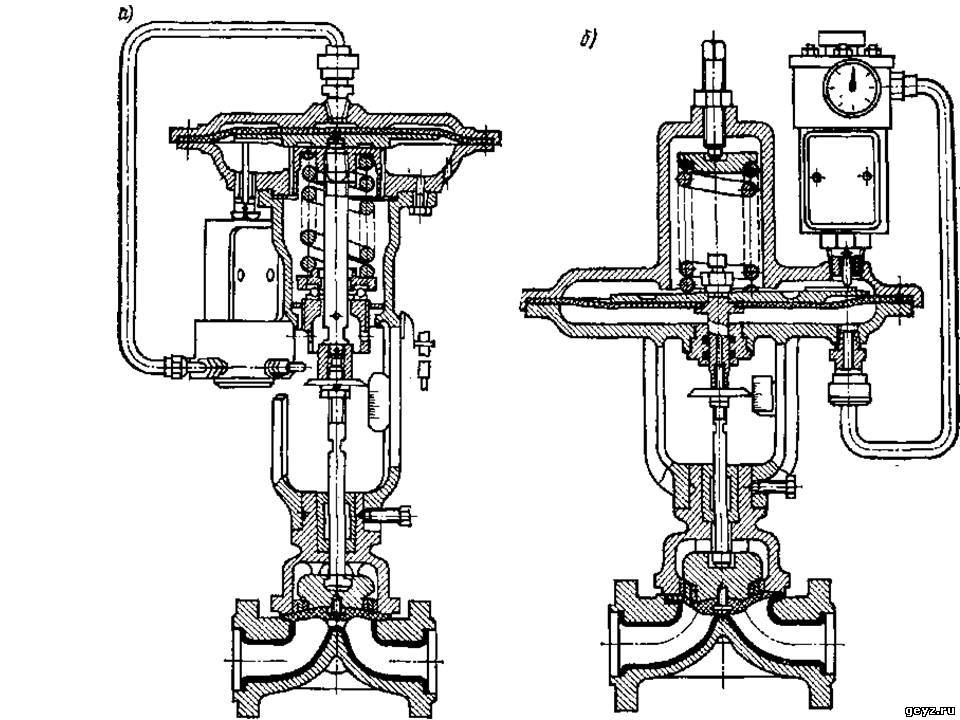
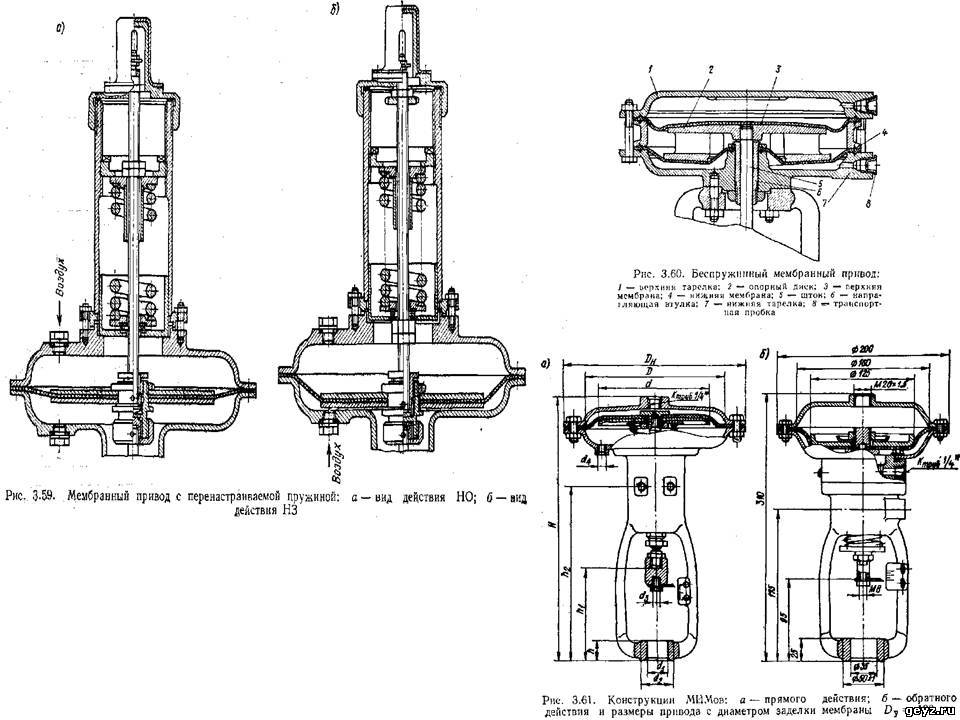
Мембранный привод представляет собой устройство, в котором движение ведомому звену передается под действием давления газа или жидкости на упругую (эластичную) мембрану из резины, полиэтилена, фторопласта или металла. Усилие, создаваемое давлением управляющей среды на мембрану, передается на «грибок», образованный штоком и опорным диском. Прогиб мембраны и ход штока определяются условием равновесия подвижной системы привода, в которую входят грибок и мембрана. Силовое равновесие системы создается в результате действия давления на мембрану и сил сопротивления на шток, включая силу, создаваемую упругой деформацией мембраны. Чтобы обеспечить возможность перемещения штока в обе стороны, силовое замыкание системы выполняется пружиной или грузом. Применяются также беспружинные приводы, в которых подвижная система уравновешивается давлением воздуха (газа) на мембранный блок с противоположной стороны. Принципиальные схемы действия мембранных приводов арматуры приведены в табл. 3.18. В рычажно-грузовых мембранных приводах усилие, создаваемое на мембране, уравновешивается постоянной силой, в пружинных — переменной, пропорциональной ходу штока. В беспружинных мембранных приводах давление на мембранный блок (действующее усилие) может регулироваться с обеих сторон. В трубопроводной арматуре мембранный привод обычно применяется с резиновой мембраной. Мембраны изготовляются из резины толщиной 2—4 мм с тканевой (парусиновой) прослойкой или без прослойки. Для коррозионных сред могут применяться мембраны с покрытием из фторопласта в виде тонкой защитной пленки. 3.18. Принципиальные схемы действия мембранных приводов арматуры 3.19. Формы сечения резиновых мембран По форме сечения мембрана может быть плоской, плоской собранной й формованной (табл. 3.19). Плоская и плоская собранная мембраны изготовляются из листовой резины. В плоской мембране отверстия под болты и на фланцах корпуса совпадают. Плоская собранная мембрана имеет отверстия под болты, расположенные по окружности большего диаметра, чем на фланце, благодаря этому при установке мембраны в привод она приобретает выгнутую форму. Формованная мембрана получает выгнутую форму при изготовлении ее в пресс-форме; она обладает наиболее целесообразной формой, поскольку оказывает наименьшее сопротивление при упругом деформировании в процессе работы в приводе. Технология изготовления формованной мембраны из прорезиненной ткани заключается в следующем. Вырезанную заготовку формуют в нагретой до 14G ± 5 °С пресс-форме с выдержкой в течение 6—12 мин. Заготовка формуется при упруго защемленной периферии. Глубина вытяжки может достигать 1/3 D при угле наклона образующей конуса к плоскости мембраны до 50^ Во всех случаях передача усилия с мембраны на шток осуществляется с помощью опорного диска, образующего для мембраны опорную площадку. Обычно выбирают диаметр опорного диска d ^ 0,8Z> (в пределах от 0,75D до 0,85£>), где D — диаметр заделки мембаны. Ход ШТОЕЗ принимают в пределах Sy = (0,1-0,2) D, причем он распределяется несимметрично относительно плоскости заделки мембраны: принимается ход в 2/3 Sy — выше и 1/3 Sy — ниже плоскости заделки, где 5у — полный ход мембраны (условный ход плунжера регулирующего клапана). Это обеспечивает большую долговечность мембраны. В арматуре с поворотным затвором (заслонка) мембранный привод можно применять, используя в качестве передаточного механизма рычажкую передачу. Наиболее широко мембранный пружинный привод с резиновой мембраной применяется в регулирующей арматуре — в регулирующих клапанах, где он носит название мембранный исполнительный механизм (МИМ). Для запорной арматуры и для двухпозиционного регулирования используются мембранно-пружинные исполнительные механизмы повышенной мощности (МИМП). Полный ход штока МИМа должен совершаться при изменении командного давления воздуха (или инертного газа) от 0,02 до 0,1 МПа. При работе привода без позиционного реле (позиционера) это командное давление подается на мембрану и является одновременно управляющим давлением. При работе с позиционером командное давление подается в позиционер, а в привод подается управляющее давление воздуха обычно до 0,25 МПа, В гидропривод в качестве управляющей среды обычно подается масло под давлением от 0,1 до 0,3 МПа. Регулирующие и запорные клапаны с мембранным приводом могут быть с видом действия НО («нормально открыт») и НЗ («нормально закрыт»). Клапан с видом действия НО при прекращении действия энергии, создающей перестановочное усилие, автоматически открывается под действием усилия пружины, клапан с видом действия НЗ — автоматически закрывается. Требуемый вид действия может быть достигнут двумя способами: применением, различных МИМов прямого или обратного движения (пружина открывает или закрывает клапан) для одного клапана или применением одного МИМа для разных клапанов с прямым или обратным расположением затвора (плунжера). Возможные конструктивные варианты компоновки МИМов для клапанов с видом действия НО и НЗ приведены на рис. 3.57— 3.59. Беспружинные мембранные приводы имеют (рис, 3.60) две мембраны, а полость между ними сообщается с атмосферой. Этим достигается уменьшение деформации каждой из мембран в сторону ее растяжения, что увеличивает срок их службы. Недостатком беспружинных мембранных приводов является невозможность обеспечения требуемого вида действия НО или НЗ при отсутствии управляющего воздуха, так как в этом случае затвор клапана перемещается под действием давления рабочей среды. Беспружинный исполнительный механизм имеет меньшие высоту и массу, чем пружинный, и при одинаковых диаметрах заделки мембраны может создавать увеличенное по сравнению с пружинным перестановочное усилие, так как в нем нет пружины, противодействующей перемещению мембраны. Беспружинные исполнительные механизмы могут управляться с использованием буферной полости, в которой поддерживается постоянное давление, или с применением реверсивного позиционера. Рис. 3.57. Мембранный привод с перенастраиваемым плунжером: а — вид действия НО; б — вид действия НЗ
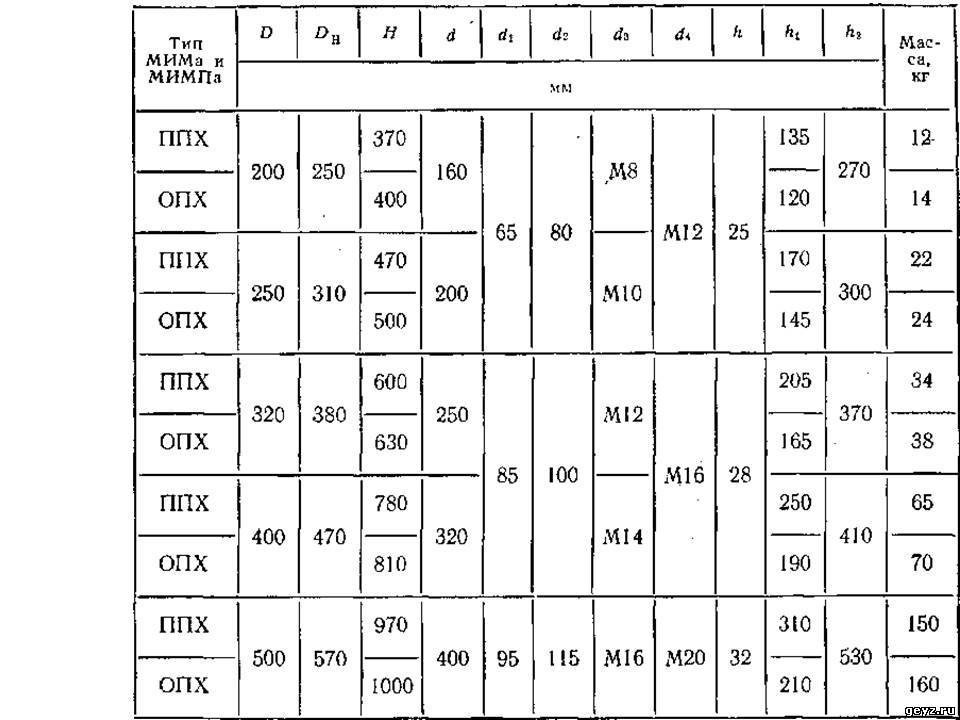
Воздушный (газовый) буфер выполняет роль пружины возврата и создает силовое замыкание подвижной системы. При управлении с помощью реверсивного позиционера подача управляющего воздуха производится позиционером. Перемещение штока происходит под действием перестановочного усилия, создаваемого разностью давлений, действующих на мембраны мембранного блока. Несмотря на некоторые возможные различия, конструкция МИМа общепромышленной арматуры приобрела установившийся характер (рис. 3.61). В табл. 3.20 приведены основные параметры МИМа (для регулирующих устройств) и МИМПа (для запорных и отсечных устройств). В зависимости от направления движения выходного штока МИМ и МИМП могут быть прямого движения (ППХ) и обратного движения (ОПХ). Основные габаритные и присоединительные размеры МИМов и МИМПов приведены в табл. 3.21. Условные обозначения размеров приведены на рис. 3.61. В табл. 3.22 приведены основные параметры МИМов, укомплектованных позиционерами. По допустимым условиям эксплуатации МИМы подразделяются на три группы: группа I — для работы при температуре окружающего воздуха от —50 до +50 °С; группа И — от —30 до 4-50''С; группа П1 — от —15 до +50 °Q. Относительная влажность воздуха допускается в пределах 30—80 %. При температуре 35 °С допускается относительная влажность воздуха до 95 %. Рис. 3.58, Мембранный привод со сменными мембранными головками: а — вид действия HQ; 6 — вид действия НЗ
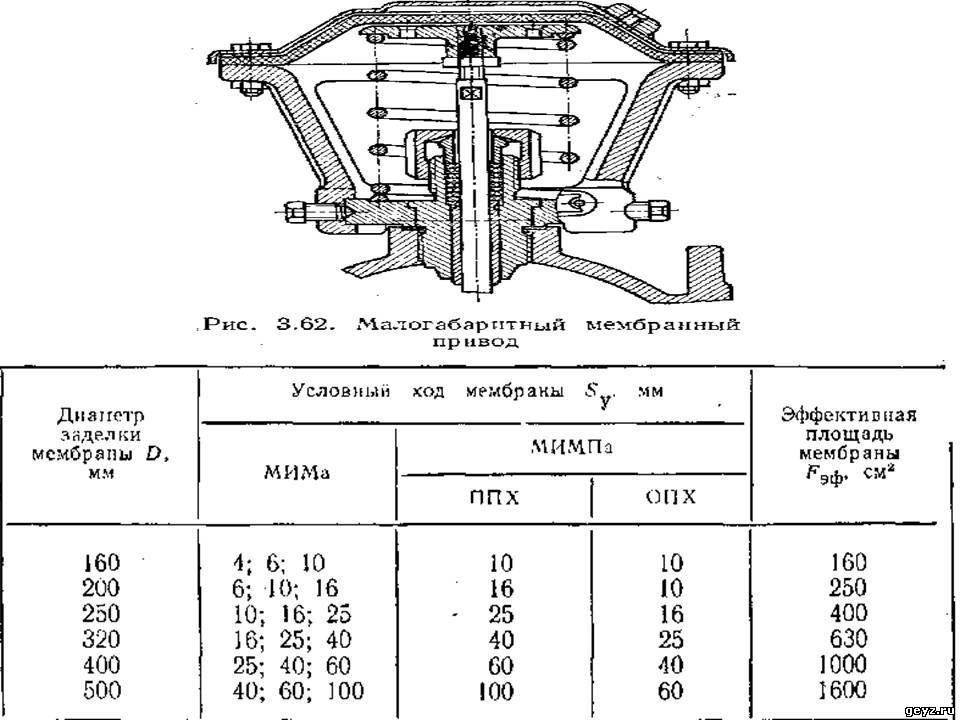
Если для управления клапаном не требуется значительного перестановочного усилия, могут применяться малогабаритные мембранно-пружинные приводы, один из которых показан на рис. 3.62. В нем снижение габаритных размеров достигнуто не только за счет уменьшения диаметра мембраны, но и тем, что шток привода и арматуры объединен, сальник расположен внутри пружины, регулировка усилия и хода пружины взаимосвязана. Мембранный привод может быть использован для непрерывного регулирования расхода среды и для двух позиционного управления арматурой («Открыто»—«Закрыто»). При двухпозиционном управлении характер изменения перестановочного усилия с ходом штока не имеет значения для работы арматуры, требуется лишь совершительный ход в пределах установленных давлений управляющего воздуха и в течение заданного промежутка времени. При непрерывном регулировании важное значение приобретает ходовая характеристика исполнительного механизма, оказывающая влияние на ход плунжера в клапане, а следовательно, и на изменение расхода среды. Ходовая характеристика определяет зависимость перемещения выходного элемента S исполнительного механизма от командного давления: S = f (р), где р — текущее значение командного давления. Обычно используются механизмы с линейной ходовой характеристикой, а требуемая пропускная гидравлическая характеристика обусловливается формой и размерами плунжера. В отдельных случаях может быть применена ходовая характеристика иной формы путем применения некоторых передаточных механизмов. Наиболее совершенным и универсальным способом создания ходовой характеристики исполнительного механизма требуемой формы является применение позиционеров, оснащенных сменными кулачками для обратной связи. В обычных условиях наиболее часто используются мембранные исполнительные механизмы без позиционера, а командный сигнал задается давлением воздуха, действующим на мембрану. Давление воздуха определяет собой значение перестановочного усилия.
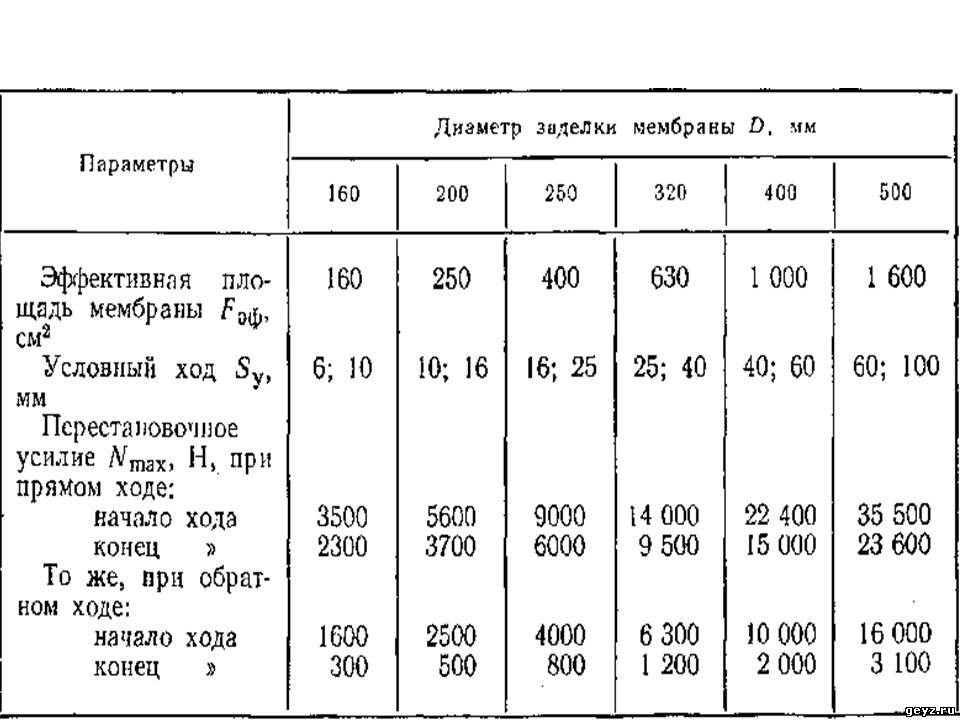
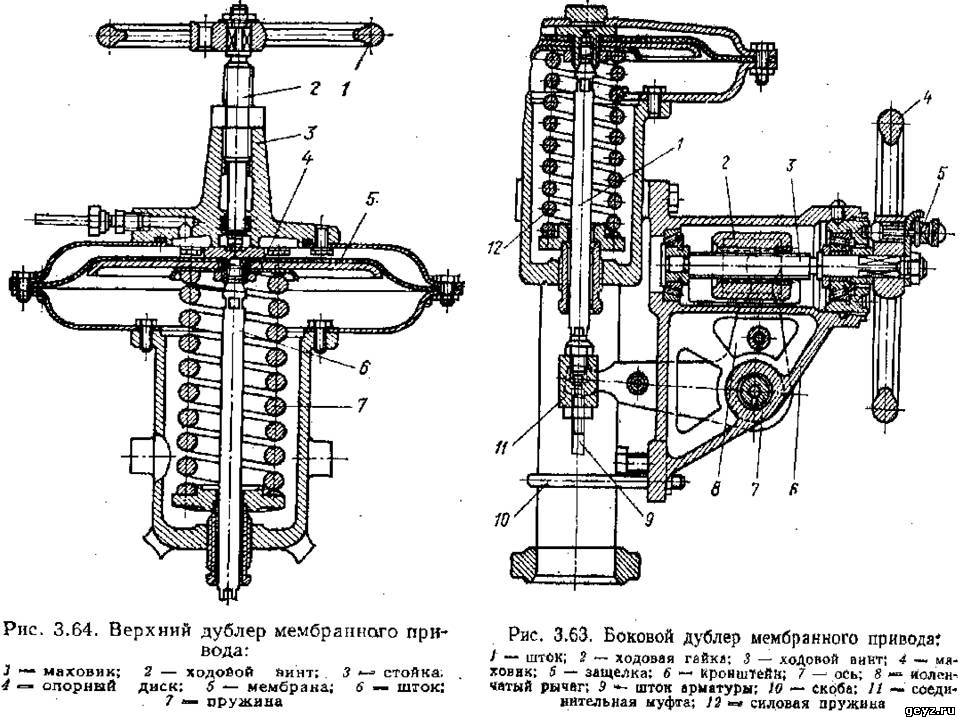
3.20. Основные параметры МИМов и МИМПов 3.21. Основные габаритные и присоединительные размеры МИМов и МИМПов (по ГОСТ 13373—67 *) 3.22. Основные параметры МИМов прямого и обратного движения, укомплектованных позиционерами Под перестановочным усилием понимают усилие N, равное перестановочному сопротивлению на штоке клапана, которое необходимо создать на исполнительном механизме при управлении регулирующим органом. Регулятор давления общепромышленной арматуры обычно состоит из двухседелького тарельчатого клапана, снабженного мембранным рычажно-грузовым приводом, поэтому ход штока требуется небольшой. Расчетное значение хода в этом случае, где df — диаметр отверстия в седле клапана. Здесь применим и используется привод с плоской мембраной сравнительно небольшого диаметра. Мембрана играет не только роль привода, но и роль чувствительного элемента. Применение формованной мембраны большого диаметра здесь нецелесообразно, так как она образует элемент повышенной чувствительности, при котором малые изменения давления будут приводить к резким перемещениям плунжера с большой амплитудой. Тогда возникнет опасность работы с ударами плунжера о седло. Малая плоская мембрана создает не только менее чувствительную систему, но благодаря повышенной жесткости мембраны несколько приближает астатический характер работы регулятора с резкими перемещениями плунжера к более спокойной работе пропорционального регулятора. При этом несколько увеличивается неравномерность отрегулированного давления, зато работа клапана приобретает более спокойный характер. Для расширения области применения МНМов и придания им дополнительных возможностей они оснащаюггся вспомогательными блоками, в число которых входят: ручной дублер (боковой и верхний), позиционное реле или позиционер (простой — одностороннего действия и реверсивный, или двойного действия), бустер (усилитель мощности), фиксатор положения, пневматический или электрический датчик положения, ограничитель хода, ограничитель усилия и др. Ручной дублер служит для ручного управления МИМом в случае аварийного отключения управляющей среды, при повреждении мембраны или при поломке пружины. Применяются боковой ручной дублер и верхний ручной дублер. Боковой ручной дублер (рис.. 3.63) представляет собой механизм, закрепляемый на стойке МИМа. болтами и скобами. Дублер снабжен двуплечным коленчатым рычагом, с помощью которого, принудительно сжимая пружину, перемещается шток. Для того чтобы обеспечить возможность работы МИМа без участия дублера, боковые пазы с ходовой гайке делают значительно шире концов рычага. При этом рычаг должей находиться в среднем положении — против отметки «Автомат» на шкале указателя положения гайки. Указатель устанавливается на наружной поверхности корпуса. Верхний ручной дублер (рис. 3.64) представляет собой ходовой винт, размещенный в стойке, прикрепленной к крышке мембран¬ной камеры. Винт снабжен маховиком для ручного управления. При ввинчивании винт опускает опорный диск с мембраной, сжи¬мая при этом силовую пружину. Верхний ручной дублер значи¬тельно проще по конструкции, чем боковой, но обладает рядом недостатков. Он одностороннего действия, применим только при исправной пружине, значительно увеличивает габаритные размеры МИМа по высоте. При ремонтных работах, связанных с заменой мембраны или пружины, он не может быть использован, так как снимается вместе с крышкой МИМа. Боковой ручной дублер имеет более сложную конструкцию, но он двойного действия и может быть использован при ремонтных работах, так как может быть установлен на работающем оборудовании. Верхний ручной дублер для установки требует отключения МИМа от воздушного питания. Мембранный пружинный исполнительный механизм имеет ход, пропорциональный давлению управляющей среды. Управляющее давление в МИМе без позиционера является и командным давлением, и однозначно определяет положение плунжера регулирующего клапана. В реальных условиях имеется рассогласование (расхождение) между расчетным и реальным ходом в связи с действием ряда факторов. Для улучшения эксплуатационных качеств регулирующих клапанов, т. е. снижения рассогласования хода до минимума, используются позиционеры (позиционные реле). Позиционер представляет собой устройство, предназначенное для управления перемещением штока строго пропорционально командному давлению путем использования обратной связи по положению штока. Таким образом, исключается влияние сил трения, неуравновешенности плунжера, изменений эффективной площади мембраны с ходом плунжера, вязкости рабочей среды и некоторых других факторов на положение плунжера, т.е. сводится к минимуму рассогласование между командным давлением и действительным ходом плунжера. При действии указанных выше факторов рассогласование может быть велико и доходит до 30 %, например в мембранных регулирующих клапанах. Позиционеры уменьшают рассогласование до 1,5—2 % и менее, снижают запаздывание работы регулирующих клапанов, поскольку объем позиционера во много раз меньше объема мембранной камеры МИМа. Применение позиционеров целесообразно в следующих случаях: в системах точного регулирования, когда рассогласование без применения позиционера выходит за пределы допустимых погрешностей; при высоких давлениях среды, когда возникает необходимость сильной затяжки сальника, создаются большие силы трения и неуравновешенности плунжера; при работе регулирующего клапана на вязких средах, на пульпе, шламе, суспензиях, когда для перемещения плунжера требуются большие перестановочные усилия; при использовании беспружинных исполнительных механизмов, когда необходимо применять реверсивные позиционеры; при больших перепадах давления на клапане (более 0,4—1,6 МПа S зависимости от условного Диаметра клапана и неуравновешенности плунжера). Позиционеры могут быть одностороннего действия и реверсивными (двойного действия). Для серийных МИМов, которыми наиболее часто комплектуются регулирующие клапаны общепромышленной арматуры, обычно применяются следующие модели отечественных позиционеров одностороннего действия: ПР-10; ПР-10-25; ПР-10-100 и ПР-4.